Core Idea In One Sentence
Given a number of pre-computed concentric spheres, local SDF fitting within DSS is enabled, and early termination as well as parallel sphere tracing are facilitated for more efficient SDF rendering.
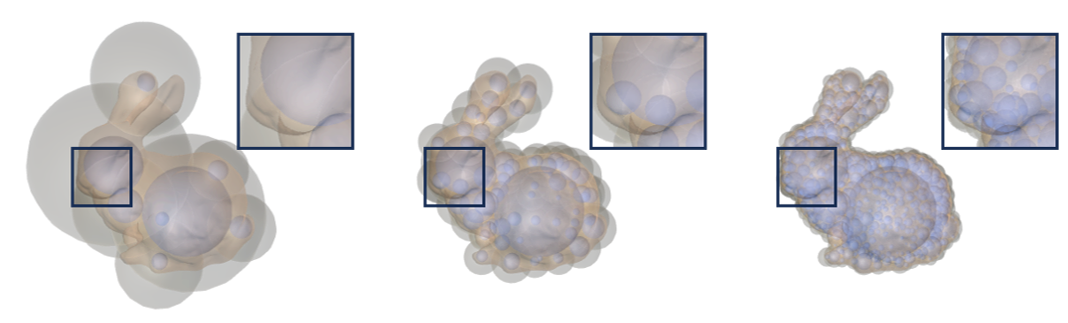
Visualization of 3D DSS
Using the Stanford Bunny as an example, yellow denotes the object, gray spheres represent the outer spheres, and blue spheres represent the inner spheres. From left to right, the number of concentric spheres is 8, 64, and 512, respectively.
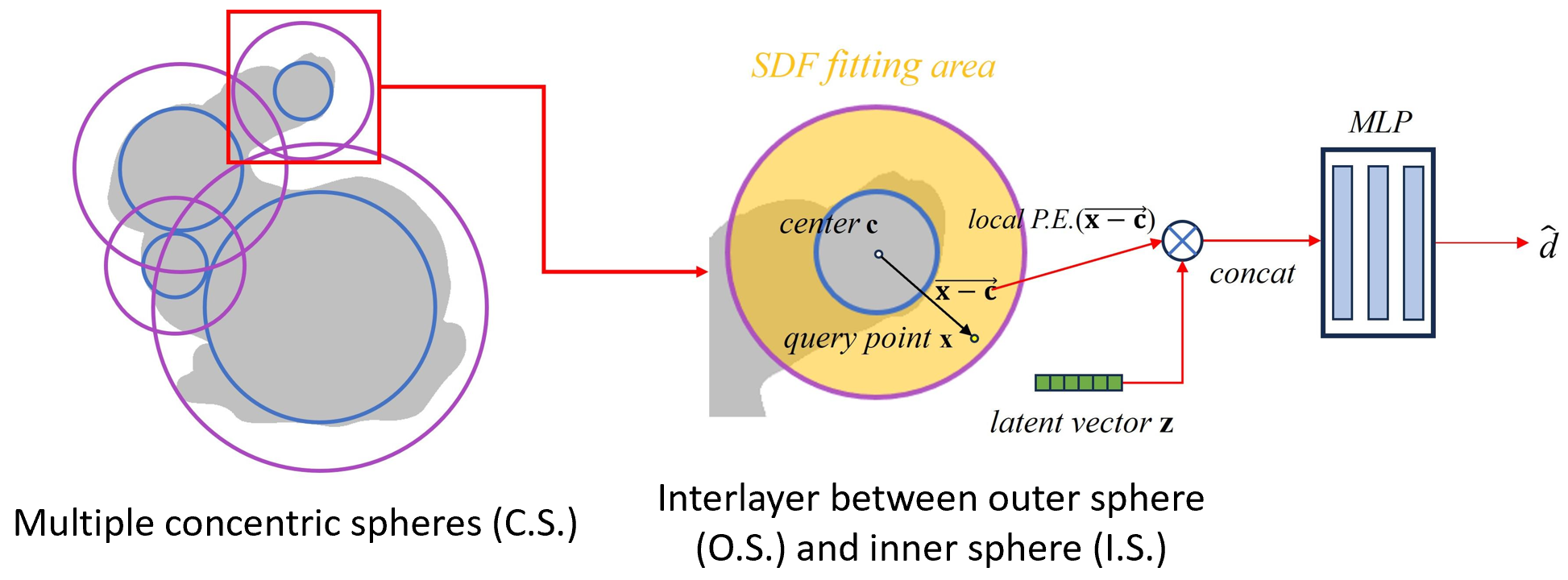
Local SDF Fitting within DSS
We fit the SDF only within the interlayer region. For any query point, we extract sphere features, apply positional encoding, concatenate the result with the latent vector of the corresponding sphere, and input it into an MLP to predict the SDF value.
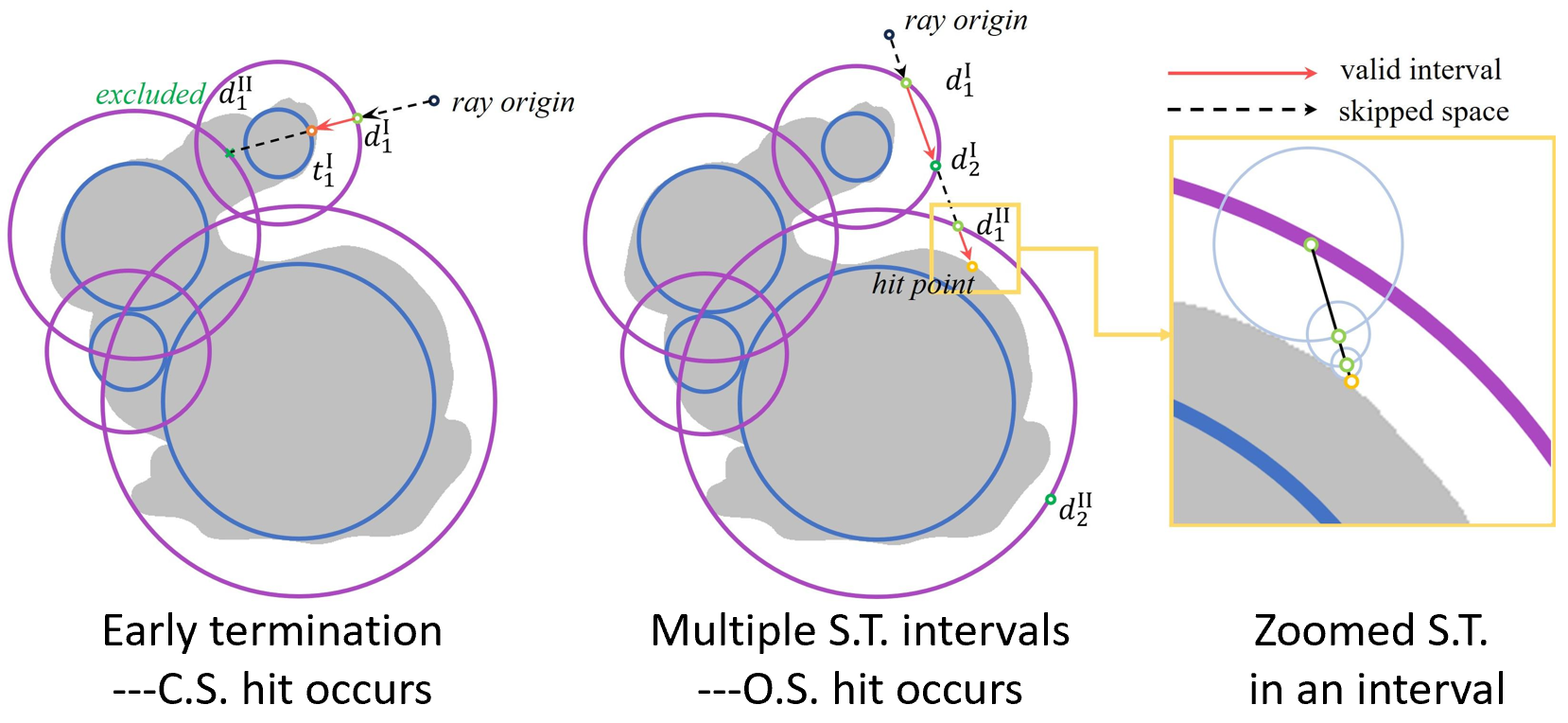
SDF Rendering Acceleration
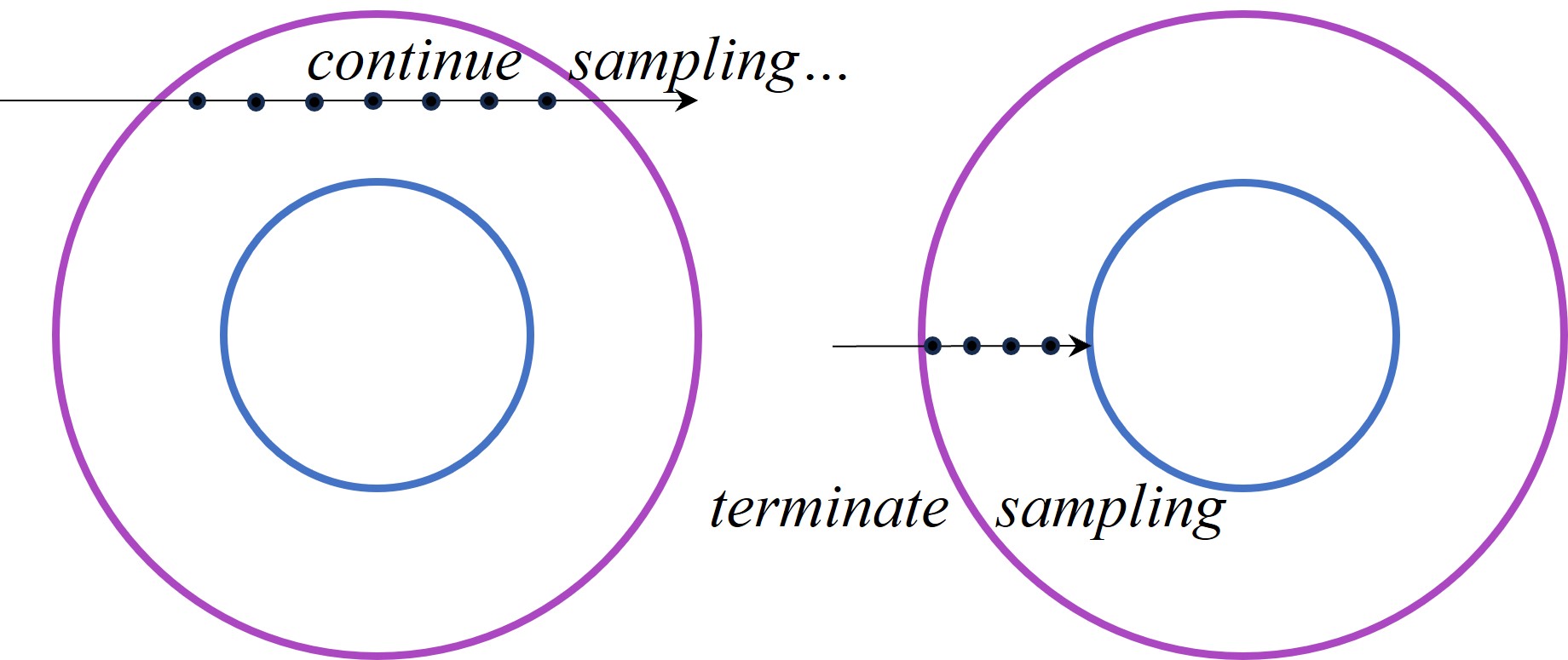
Early Termination: As illustrated in the left figure, the intersection with a pair of concentric spheres implies the early termination of ray tracing, as the ray is guaranteed to hit the model surface before reaching the inner sphere.
Parallel Sphere Tracing (S.T.): As shown in the middle, we can precompute all valid intervals along the ray where surface intersections may occur. Consequently, each valid interval can be assigned to one GPU thread for parallel sphere tracing.